This page provides the dataset and supplementary data accompanying the submission “Anomaly detection for Automotive Visual Signal Transition Estimation” (submitted to IEEE 20th International Conference on Intelligent Transportation Systems, 2017).
All data in these sets have been captured with a Logitech C920 webcam in a resolution of 960×720 and a framerate of 10fps using the linux uvc camera driver. All automatic settings (whitebalance, exposure, gain, etc.) have been set to fixed values. A synchronized GPS-receiver and IMU-unit have been attached to provide meta-data for each frame.
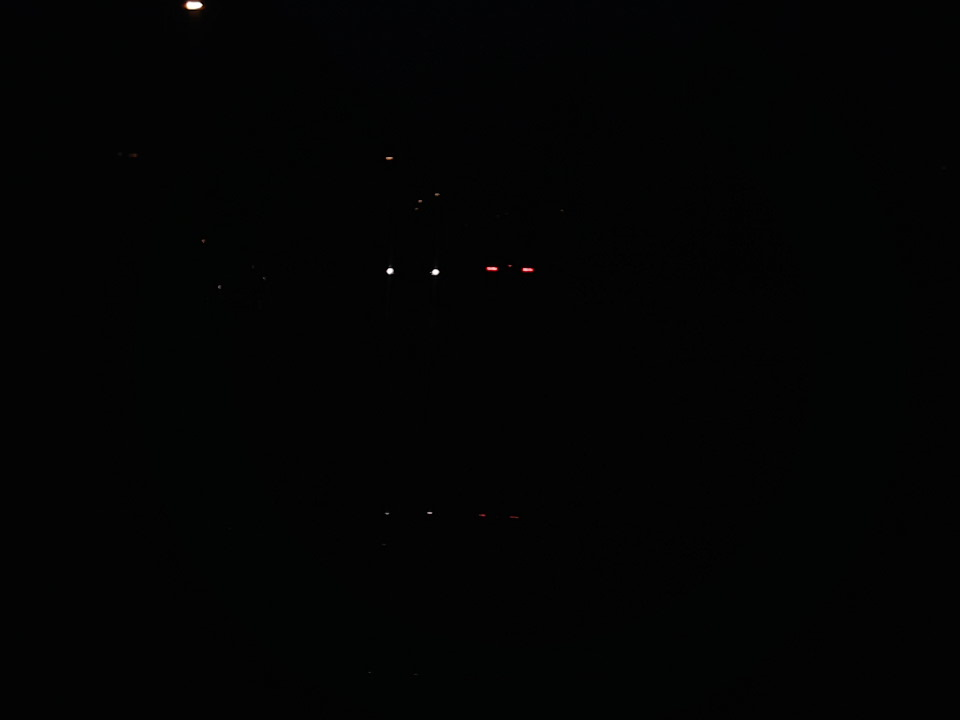
Dataset: Sequences
This dataset consists of two sequences, one in daylight (440 frames), the other at night (550 frames) of a car driving ahead, activating the brakes at random intervals. It is annotated with bounding boxes of the car (with its signal state), as well as GPS-coordinates, speed, 3D accelerometer values and 3D angular velocity values, as well as README-files explaining the datafields. The dataset can be downloaded here: dataset_sequences.zip (344 Mb). Some example frames:







Dataset: Pairs
This dataset consists of image-pairs taken at different times and weather conditions during day and night-time, in highway, rural and urban conditions, containing different car models and counts. Each frame is annotated with GPS-coordinates, speed, 3D accelerometer values and 3D angular velocity values, as well as README-files explaining the datafields. The dataset can be downloaded here: dataset_pairs.zip (42 Mb). Some example pairs are shown below:




Camera Calibration
Camera calibration has been performed using the opencv calibrateCamera functionality on features found by the cornerSubPix algorithm. Input images to these are along to the following:
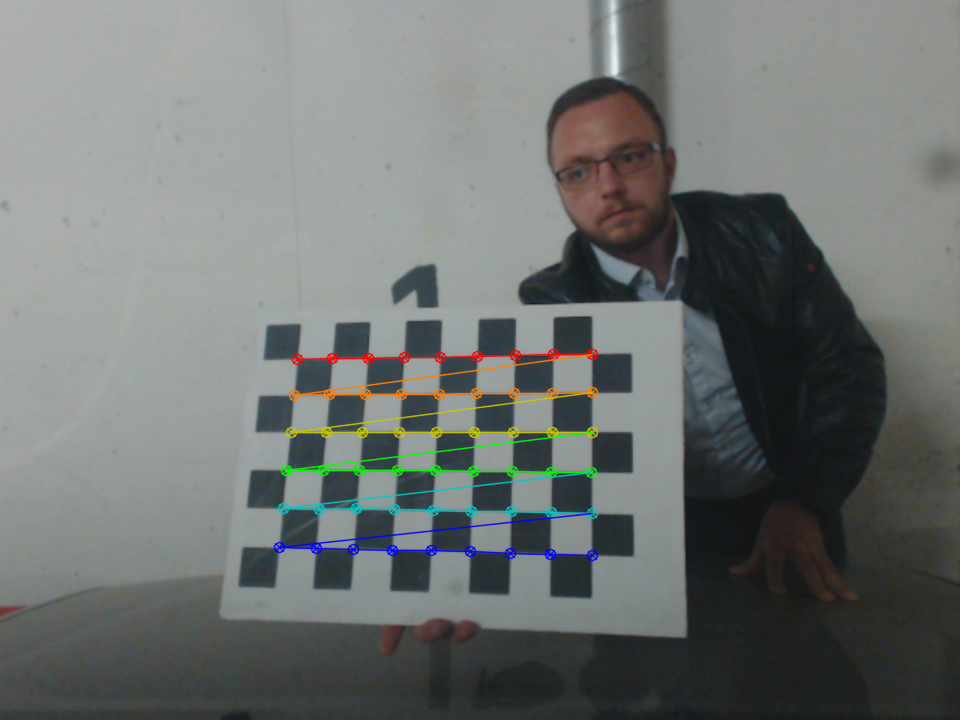
You can download the results of this calibration here: calibration_C920.txt
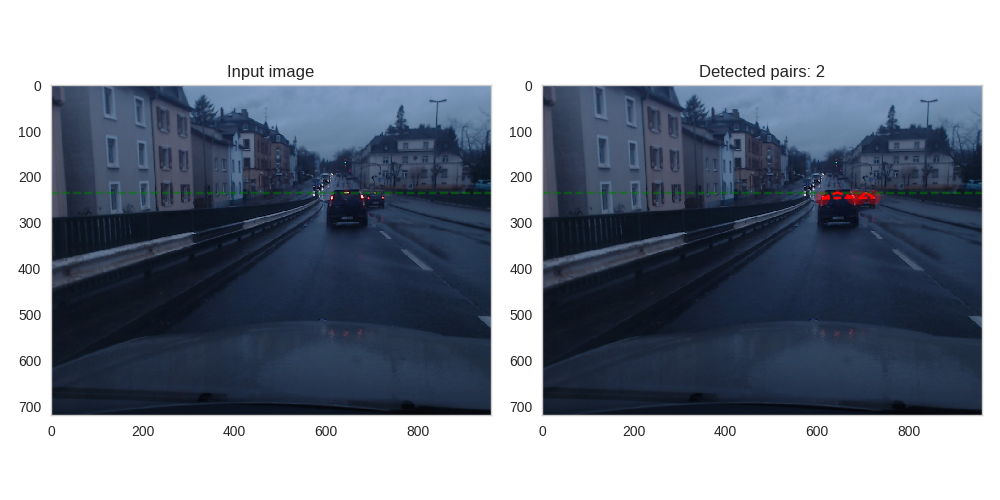
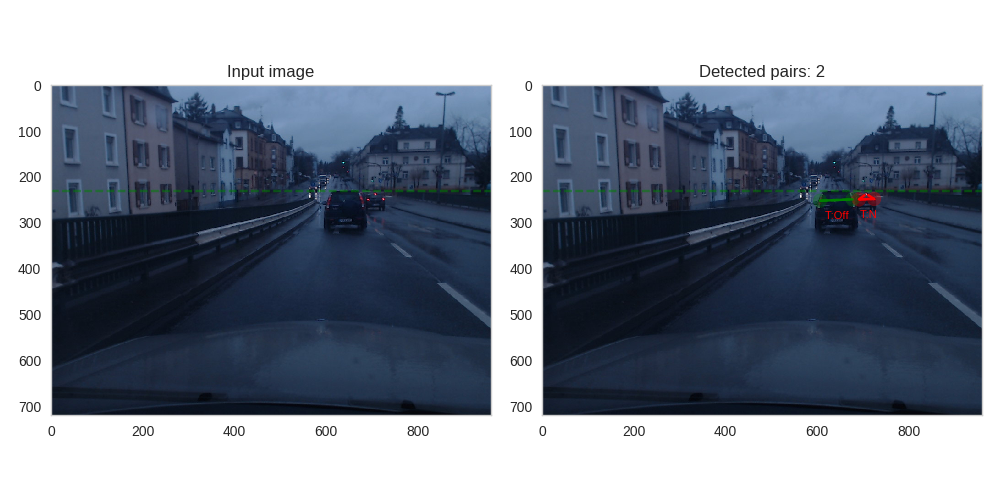
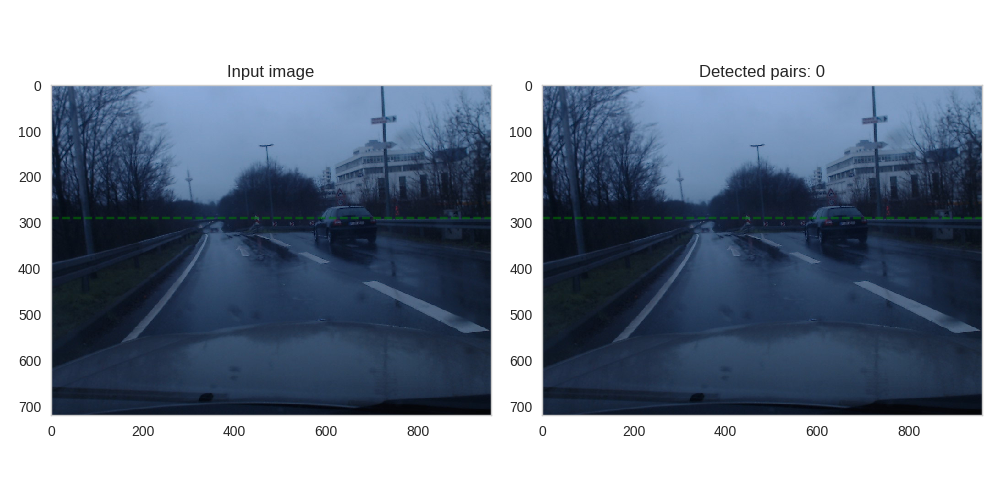
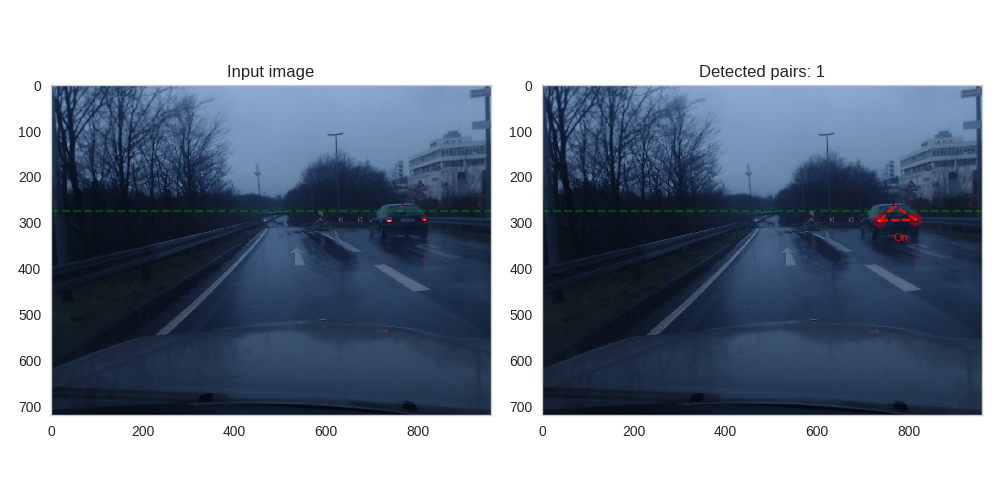
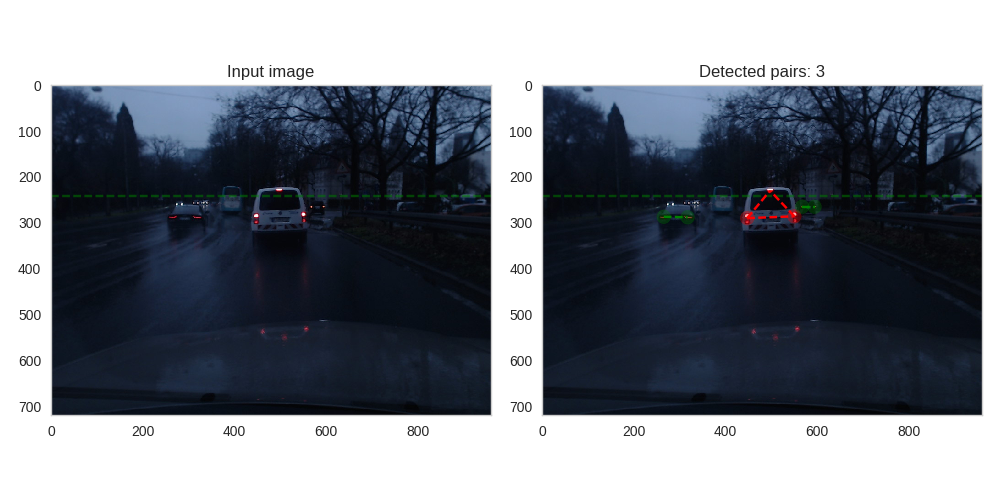
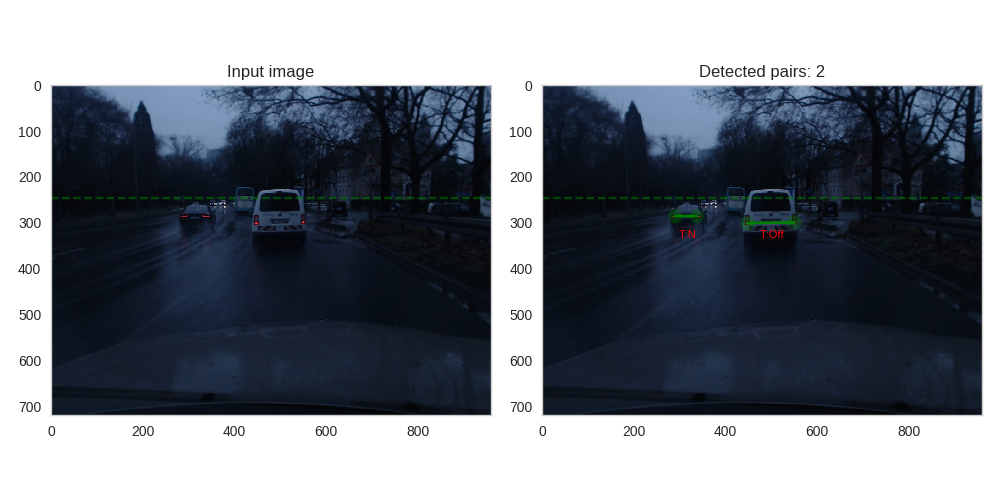
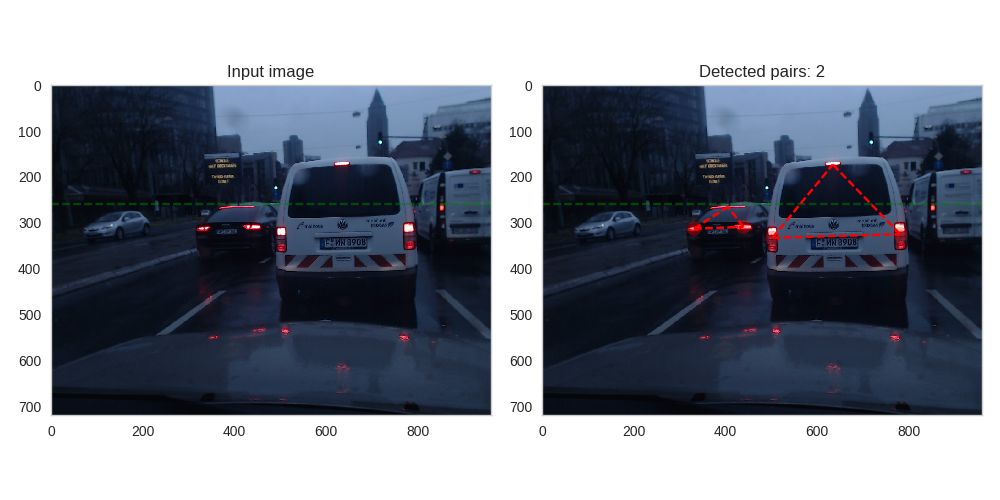
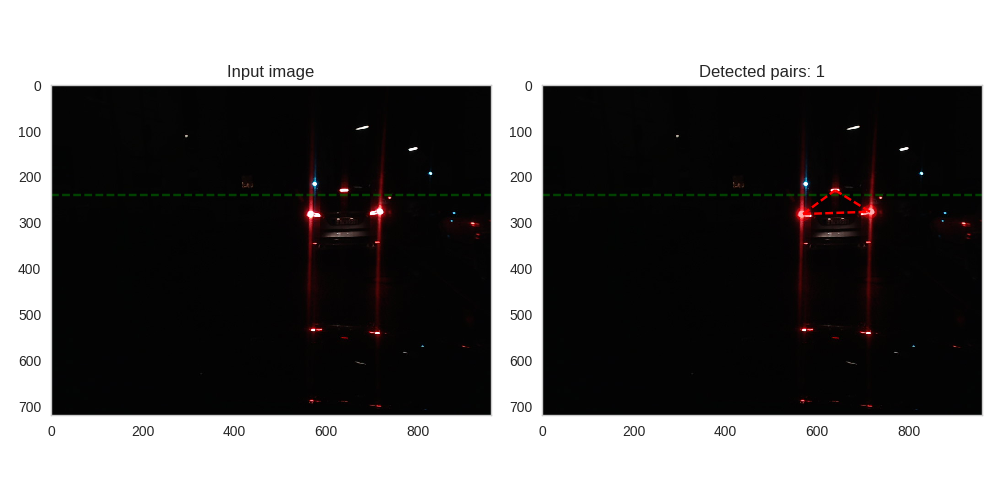
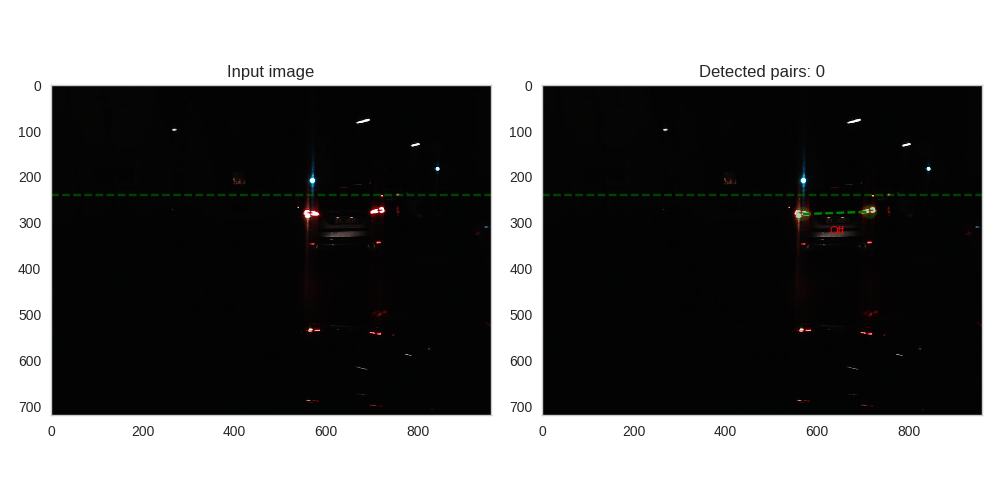
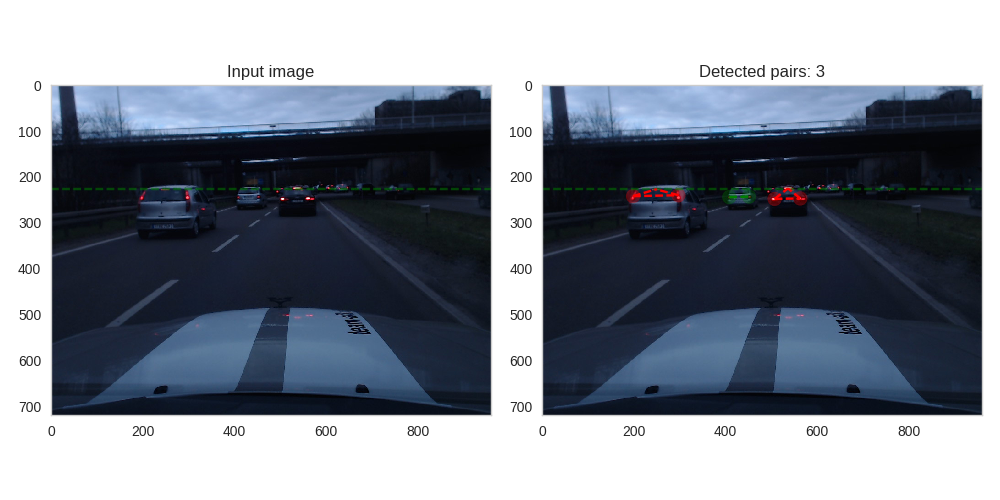
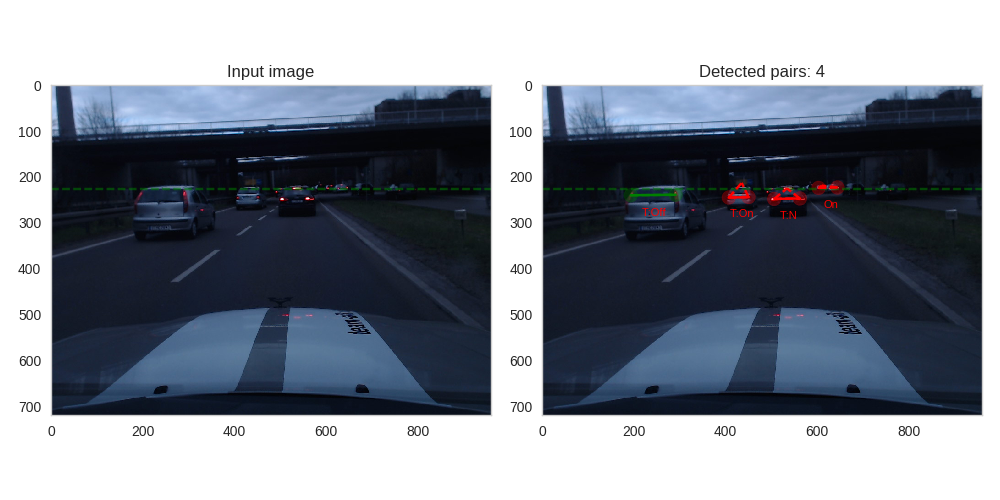
Result images
Below, some exemplary transition-detection result images are shown. The first row displays the initial estimated state, whereas the second row visualizes matched pairs and detected transitions (T:Off means a transition from brakelight = on to brakelight = off state has been detected, wheres T:On means the opposite. T:N means that no transition has happened):